Sürü robotları araştırılacak
Ege Üniversitesi Uluslararası Bilgisayar Enstitüsü öğretim üyesi Doç. Dr. Vahid Akram'ın yürütücülüğünü yaptığı 'Sürü Robot İş...
Ege Üniversitesi Uluslararası Bilgisayar Enstitüsü öğretim üyesi Doç. Dr. Vahid Akram’ın yürütücülüğünü yaptığı “Sürü Robot İş birliğine Dayalı Nesne Taşıma Sistemi” konulu proje TÜBİTAK’tan destek almaya hak kazandı. Ege Üniversitesi Rektörü Prof. Dr. Necdet Budak, Doç. Dr. Vahid Akram’ı tebrik ederek çalışmalarında başarılar diledi.
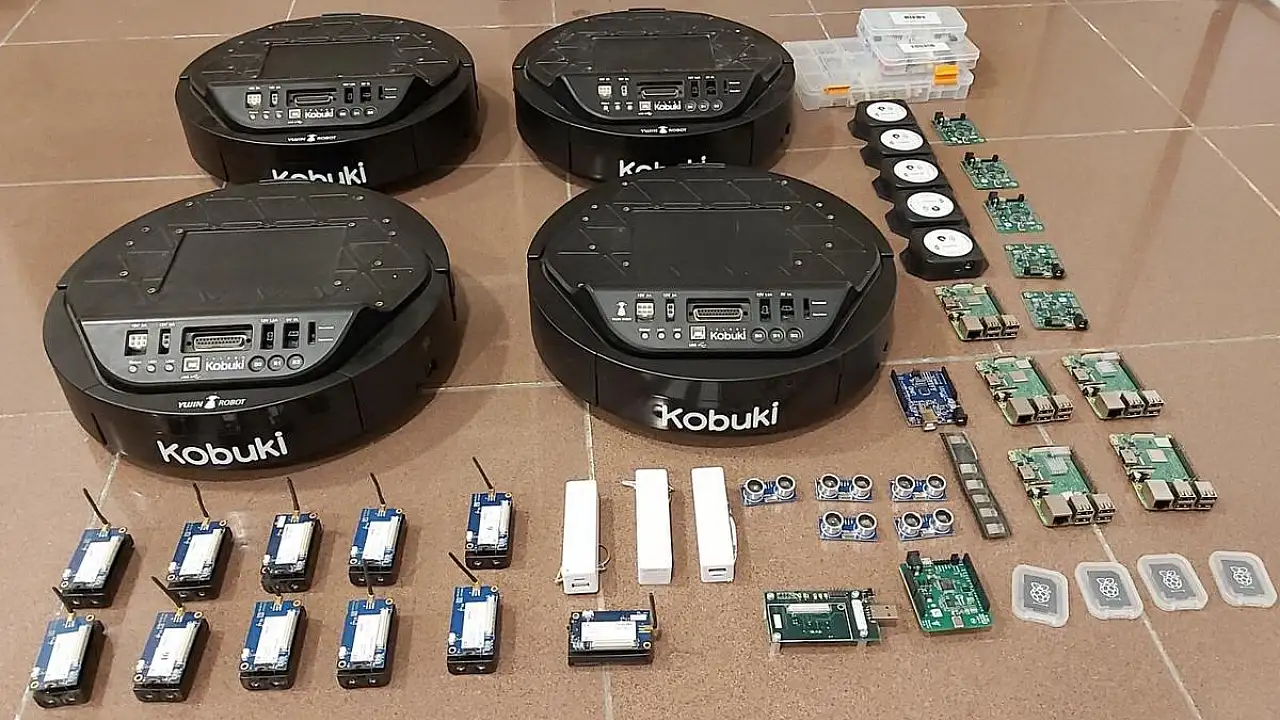
Yürüttükleri çalışma ile ilgili bilgi veren Doç. Dr. Vahid Akram, “Yüksek hareket kabiliyeti ve hesaplama gücüne sahip robotların üretim maliyeti giderek düşmektedir ve robotlar her geçen gün insanların günlük faaliyetlerinde daha fazla görev almakta. Örneğin, evlerde temizlik için kullanılan robot süpürgeler bu teknolojinin günlük hayatımızda aktif rol almaya başladığını göstermekte. Fabrikalar veya depolarda ürünleri taşıyan, restoranlarda yemek servisi yapan ve hastanelerde odaları dezenfekte eden robotlar bu teknolojinin örnek uygulamalar arasında yer almakta. Özellikle insanlar için tehlikeli, kirli ve sürekli tekrarlanan görevlerde robotların kullanımı daha fazla ilgi görmektedir. Yeni nesil robotlar çeşitli sensörler sayesinde farklı ortamlarda hareket ederek engeller, boşluklar veya açık alanları tespit edebilmektelerdir. WiFi, Bluetooth ve 5G gibi iletişim yöntemlerini destekleyen bu robotlar ortamdan topladıkları verileri kontrol merkezine gönderebilir ve aynı zamanda çok sayıda hareket, algılama ve hesaplama komutunu destekleyebilirler. Küçük robotların üretim maliyetinin düşmesiyle beraber çeşitli uygulamalarda tek robot yerine çoklu robot sistemleri tercih edilmektedir. Söz konusu projemizde, sürü robotların sağladığı eş zamanlı işlem yapabilme, görev paylaşımı ve hızlı patika bulma gibi avantajlardan yararlanarak sürü robotlara dayalı bir nesne taşıma sistemi geliştirilecektir. Bu sistemin bir prototipini geliştirmek için çeşitli problemlere gerçekçi ve uygulanabilir çözümler bulunmalıdır” diye konuştu.
“YENİLİKÇİ ÇÖZÜMLER”
Proje kapsamında birçok probleme yönelik çözümler üretileceğini vurgulayan Doç. Dr. Vahid Akram, “Sürü robotların kontrol ve izleme platformu hazırlayacağız. Sürü robotların anlık izlenmesi için ve ayrıca robotlar arası iletişim ve haberleşmeyi sağlamak için bir platform geliştirilecektir. Bu platform aracıyla kullanıcılar robotların anlık durumlarını takip edebilecek ve acil-özel durumlarda robotlara geri dön veya dur gibi hareket komutları gönderebilecekler. İç mekân ortamlarda GPS sisteminin doğruluk oranı yetersiz kalabildiği için, robotların anlık konumunu düşük hata oranıyla belirleyen yeni konumlandırma yöntemler hazırlanacaktır. Robotlar ortamda hareket ederken, duvar, merdiven ve çeşitli engellerin yerini tespit edip o bölgelerden geçmemeleri gerekmektedir. Ortamın haritasını oluşturmak için robotların çarpışma, boşluk algılama ve mesafe ölçme sensörlerinden alınan bilgiler birleştirilip, ortamın haritasını oluşturan algoritmalar hayata geçirilecektir. Haritasız bir ortamda, başlangıç ve hedef konumlar arasında verimli ve bağımsız patika bulan, engeller ve diğer robotlarla çarpışmayı önleyen ve giderek patikaları iyileştiren patika planlama ve çarpışma önleme algoritmaları geliştirilecektir” dedi.
Haber Bülteni





